
|
Hi there! I’m a soon-to-be Master’s student in Computing (General Track) at the National University of Singapore (NUS), starting this fall. I recently completed my undergraduate studies in Automation at Harbin Institute of Technology, Shenzhen. Previously, I worked as a research intern at the Tsinghua Shenzhen International Graduate School, advised by Prof. Xueqian Wang . My research interests lie in robotics, computer vision, and embodied intelligence. In my free time, I like playing guitar 🎸 and table tennis 🏓. I'm also open to collaborating on robotics-related projects. If you're a researcher looking for a partner, feel free to reach out to me! 👋 CV / Github / Personality |
|
My research interests focus on perception and planning for unmanned vehicle navigation. I aim to enhance the ability of robots to infer environmental information and navigate effectively in complex human-centered environments. Ultimately, my goal is to contribute to the development of mobile robots that can adapt to various open-world scenarios.Recently, I have studied how to integrate vision-language models into classical navigation systems to achieve socially aware navigation. |

|
Shangyi Luo, Ji Zhu, Peng Sun, Yuhong Deng, Cunjun Yu, Anxing Xiao, Xueqian Wang In submission arXiv / VideoIn this paper, we present a group-based social navigation framework GSON to enable mobile robots to perceive and exploit the social group of their surroundings by leveling the visual reasoning capability of the Large Multimodal Model (LMM). |
|
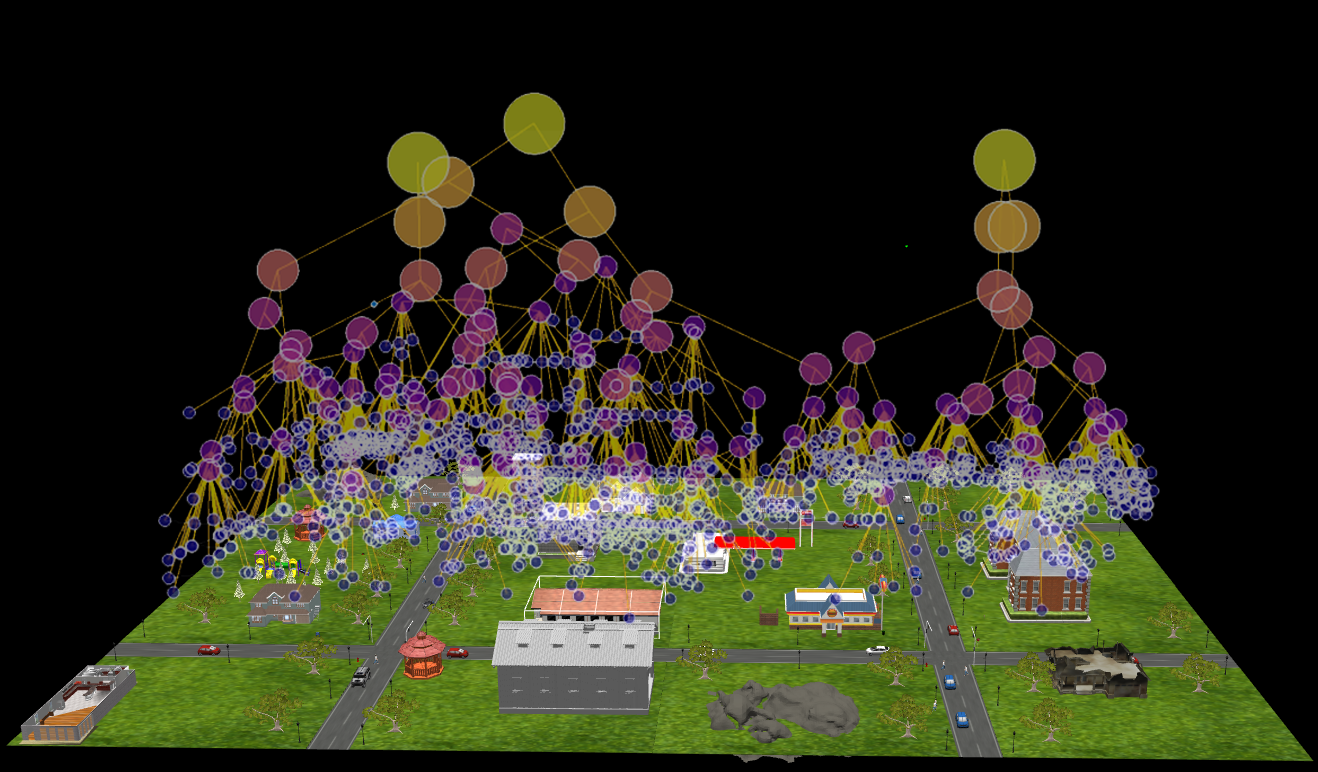
In this work, we aim to develop a retrieval-augmented grounding framework that addresses semantic consistency challenges in large-scale outdoor environments to enables open-vocabulary semantic mapping and context-aware path planning, significantly enhancing RAG's adaptability in complex outdoor scenarios. |

|
China University Aircraft Design Competition Designed an effective payload bay for the safe and accurate transportation and release of specified payloads.Conducted iterative flight tests to collect performance data, refining design, and control strategies to improve drone reliability and stability |

|
RoboMaster Competition 2022 and 2023 Focused on modular design, including gimbal, chassis, firing module, and wheel assembly, with an emphasis on weight reduction and cost control. Leveraged previous designs to upgrade a high-performance infantry robot with excellent firing, movement, and collision resistance capabilities. Lead team members in overcoming technical challenges and accelerating the development of competitive, high-performance robots. |

|
HIT Auto2023 Digital Image Processing Design Implemented object detection using color segmentation and adaptive template matching to identify targets, developed trajectory tracking through velocity control based on object positions, and applied path planning algorithms to assign tasks and optimize movement for seamless coordination between detection, tracking, and planning modules. |
|
Modified version of template from here Last updated: 23 October 2024 |